 ST-STAFF
.
June 05, 2025
.
Industry News
.
ST-STAFF
.
June 05, 2025
.
Industry News
.

Photo by Timo Wielink on Unsplash
Despite billions of dollars being invested in autonomous vehicle technology, self-driving cars continue facing significant challenges in navigating America’s unpredictable road networks. While manufacturers showcase impressive demonstrations, the gap between controlled testing environments and chaotic real-world conditions remains substantial, raising critical questions about deployment readiness and public safety.

Autonomous vehicle developers paint visions of accident-free highways and seamless transportation. However, the reality of road conditions presents obstacles that current technology struggles to overcome.
Autonomous vehicles excel in structured test environments with predictable variables and controlled conditions. These testing grounds feature perfectly marked lanes, consistent lighting, and pre-programmed scenarios. Real-world driving presents infinite variables: faded lane markings, construction zones, unexpected obstacles and rapidly changing conditions that challenge even the most sophisticated AI systems.
Self-driving algorithms operate on fundamental assumptions about human behavior and infrastructure standards. They expect drivers to follow traffic rules consistently, assume clear lane markings exist, and anticipate predictable pedestrian behavior. These assumptions break down when confronting aggressive drivers, deteriorating road infrastructure, or cultural driving patterns that vary significantly across American regions.
Contemporary autonomous vehicles face numerous scenarios that expose their current limitations and highlight the complexity of human-driven transportation systems.
Adverse weather conditions create great challenges for autonomous vehicle sensors and decision-making systems. Heavy rain obscures camera vision, snow covers lane markings and road signs, while ice creates unpredictable traction conditions. Debris on roads, misplaces construction signs and barriers and infrastructure damages such as potholes further complicate sensor interpretation, forcing systems to make decisions with contradictory information.
Human drivers can handle complex situations with the correct response that autonomous systems struggle to predict or interpret correctly. Erratic lane changes, aggressive merging, hand signals from construction workers, and pedestrians jaywalking create scenarios requiring intuitive judgement that current AI lacks. Cultural driving norms, regional traffic patterns, and individual driver personalities add layers of complexity that standardized algorithms cannot easily accommodate.
Recent autonomous vehicle incidents highlight persistent vulnerabilities in current technology. From misidentifying emergency vehicles to failing to recognize unusual road configurations, these edge cases show that rare but critical scenarios can overwhelm existing systems.
Rushing underdeveloped autonomous systems onto public roads poses significant safety risks to all road users. The pressure to commercialize technology before achieving sufficient reliability creates dangerous scenarios where beta-testing occurs on public highways rather than controlled environments, potentially putting lives at risk for competitive advantage.
Continued autonomous vehicle failures erode public confidence in self-driving technology with users often focussing on negative issues such as the legal steps after a self-driving car crash. When accidents occur, determining responsibility between manufacturers, software developers, vehicle owners, and human supervisors becomes increasingly complicated.
Addressing current autonomous vehicle limitations requires fundamental shifts in development approaches, testing methodologies and deployment strategies. Truck owners, professional drivers, and transportation stakeholders should remain informed about these limitations rather than being swayed by marketing promises.


Industry News
This is not the truck we deserve, but the truck we need The 2021 Dodge Durango was launched a few days back and has been… Continue reading
Logan Wade . July 15, 2020

Department
Mark shows how easy it is to tackle a common task: fabricating and installing a CUSTOM patch panel for your restoration! PANEL CUTTING & DEBURRING… Continue reading
Adam Johnson . February 14, 2022

F100 Builders Guide
WE PICK UP OUR NEWEST installment of HOT WIPs (Works in Progress) with an under-construction build over at Pope’s Hot Rods. This insanely cool 1964… Continue reading
Mike Alexander . May 12, 2020

Department
Here’s What’s Inside! FEATURES Pharr Out 1958 Chevrolet Apache Dream Comes True Bare Metal Reinventing What’s Cool Family Affair Building an ’86 Mazda B2000… Continue reading
Chris Hamilton . April 02, 2020
Department
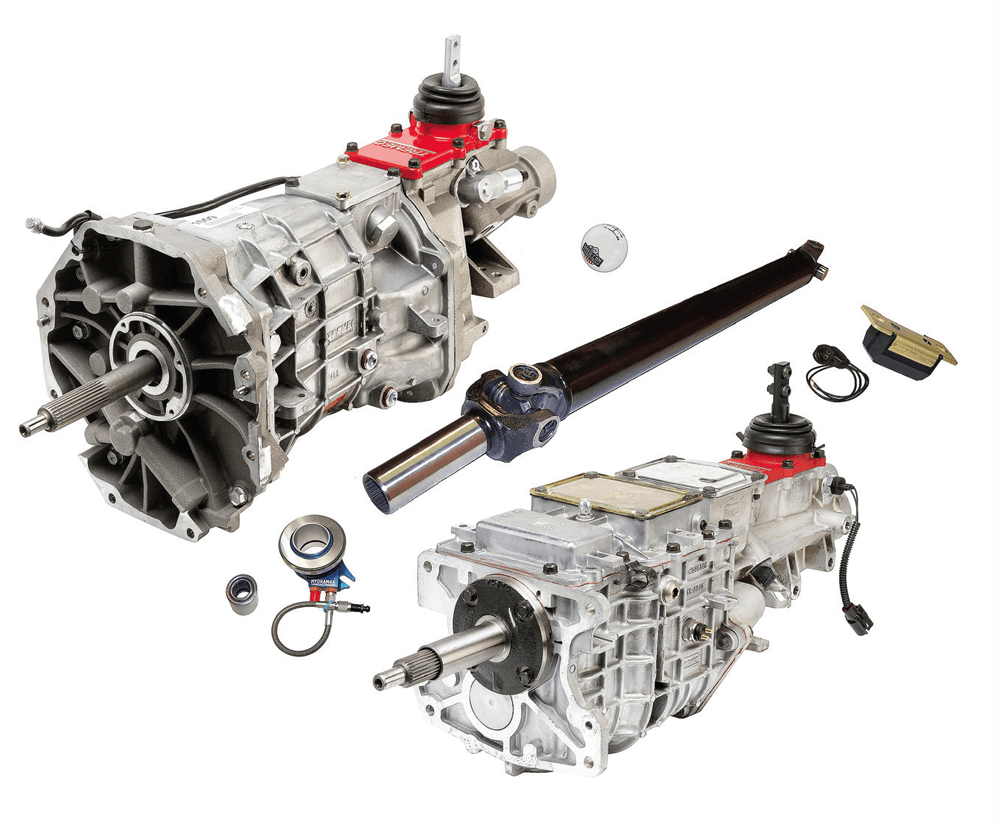
The Right Hardware for Your Hauler OBS POWER AMERICAN POWERTRAIN ADDS 1988-98 CHEVY/GMC C1500 (OBS) TRUCK FIVE- AND SIX-SPEED KITS TO ITS PROFIT LINE. The… Continue reading
Chris Hamilton . June 28, 2019
Department
We have resigned to the fact that the EV (Electric Vehicle) is the way of the future, much like the occasional plant-based meat. And just… Continue reading
ARON SOLOMON . November 30, 2021





Share Link